Moteurs
Le Rover est équipé de 10 moteurs :
- 6 pour la fonction motrice : avancer / reculer
- 4 pour l'orientation des roues avants et arrières
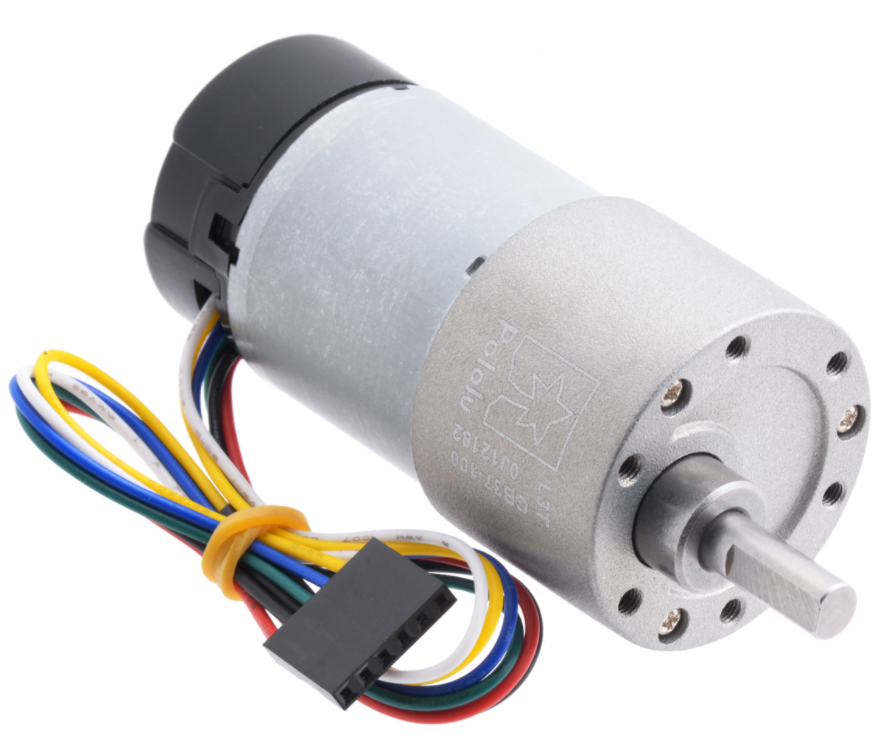
Les 6 moteurs principaux sont des moteurs en courant coutinu Pololu équipé d'encodeurs
Référence :
100:1 Metal Gearmotor 37Dx73L mm 12V with 64 CPR Encoder (Helical Pinion)
This gearmotor is a powerful 12V brushed DC motor with a 102.08:1 metal gearbox and an integrated quadrature encoder that provides a resolution of 64 counts per revolution of the motor shaft, which corresponds to 6533 counts per revolution of the gearbox’s output shaft. The gearbox is composed mainly of spur gears, but it features helical gears for the first stage for reduced noise and improved efficiency. These units have a 16 mm-long, 6 mm-diameter D-shaped output shaft.
Key specifications:
| voltage | no-load performance | stall extrapolation |
|---|---|---|
| 12 V | 100 RPM, 200 mA | 34 kg⋅cm (470 oz⋅in), 5.5 A |
https://www.pololu.com/product/4755
https://www.pololu.com/category/116/37d-metal-gearmotors
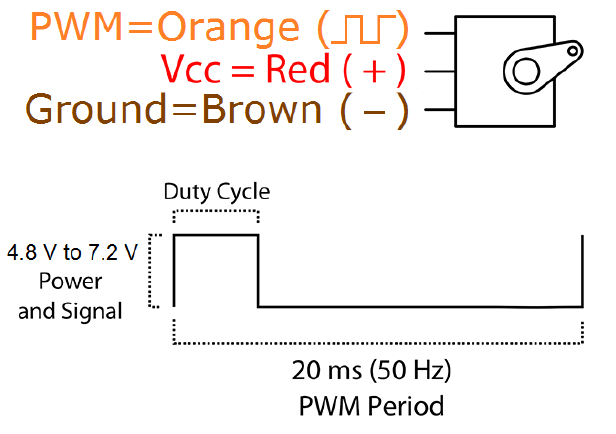
Les 4 moteurs de direction sont des servos de type MG996R
Spécifications :
• Weight: 55 g • Dimension: 40.7 x 19.7 x 42.9 mm approx. • Stall torque: 9.4 kgf·cm (4.8 V ), 11 kgf·cm (6 V) • Operating speed: 0.17 s/60º (4.8 V), 0.14 s/60º (6 V) • Operating voltage: 4.8 V a 7.2 V • Running Current 500 mA – 900 mA (6V) • Stall Current 2.5 A (6V) • Dead band width: 5 μs • Stable and shock proof double ball bearing design • Temperature range: 0 ºC – 55 ºC

https://github.com/FredJ21/MarsRover2020/tree/master/Electronic