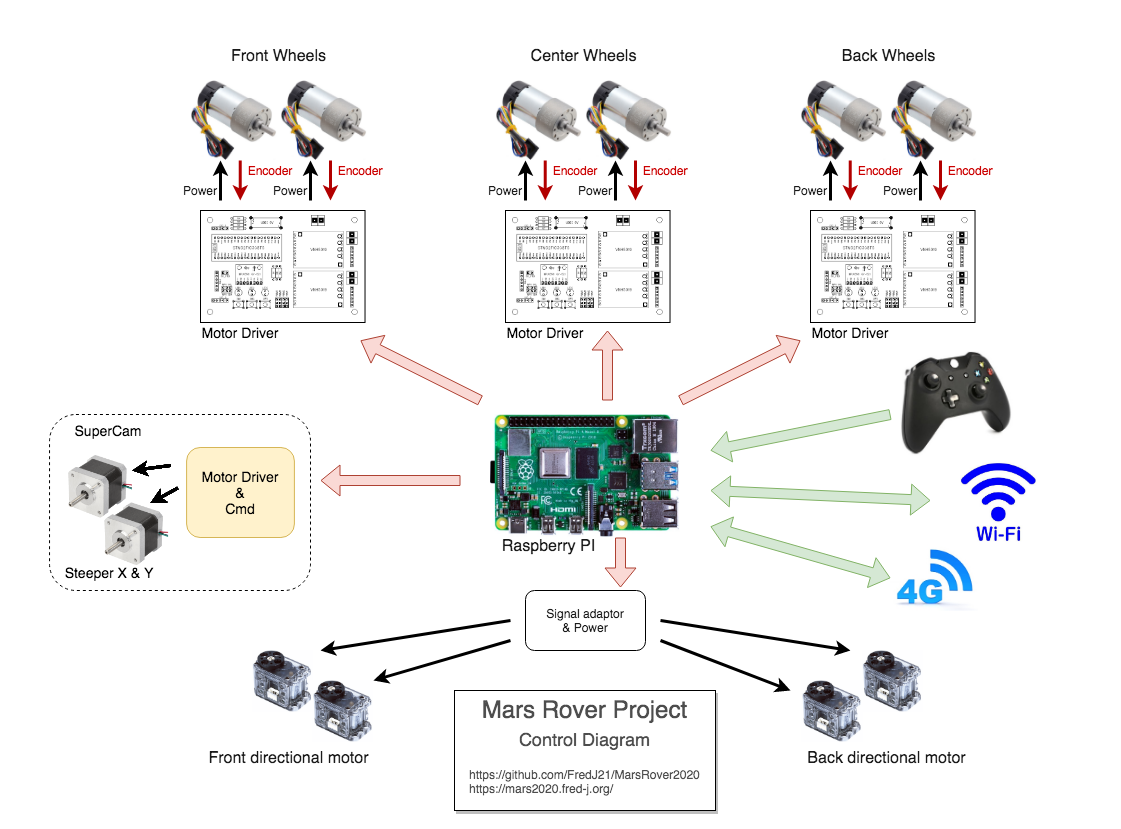
Electronique
Le rover est équipé de 10 moteurs :
- 6 moteurs à courant continu avec encodeur
- 4 servos moteurs pour les roues directionnelles
Les moteurs à courant continu sont pilotés par une carte de puissance équipée d'un microprocesseur STM32.
- Cette carte est autonome pour la gestion de la vitesse et pour l'accélération (PID)
- elle alimente les moteurs et gère les impulsions des encodeurs
- elle reçois ses instructions par son bus I2C
- elle est équipée de deux pont en H de type VNH5019 (12A) afin de piloter deux moteurs
- Le rover est donc équipé de 3 cartes afin ce contrôler les 6 moteurs
Un autre module est chargé de la gestion des deux moteurs pas à pas de la Supercam
L'ensemble est piloté par une Raspberry PI , au centre de l'architecture
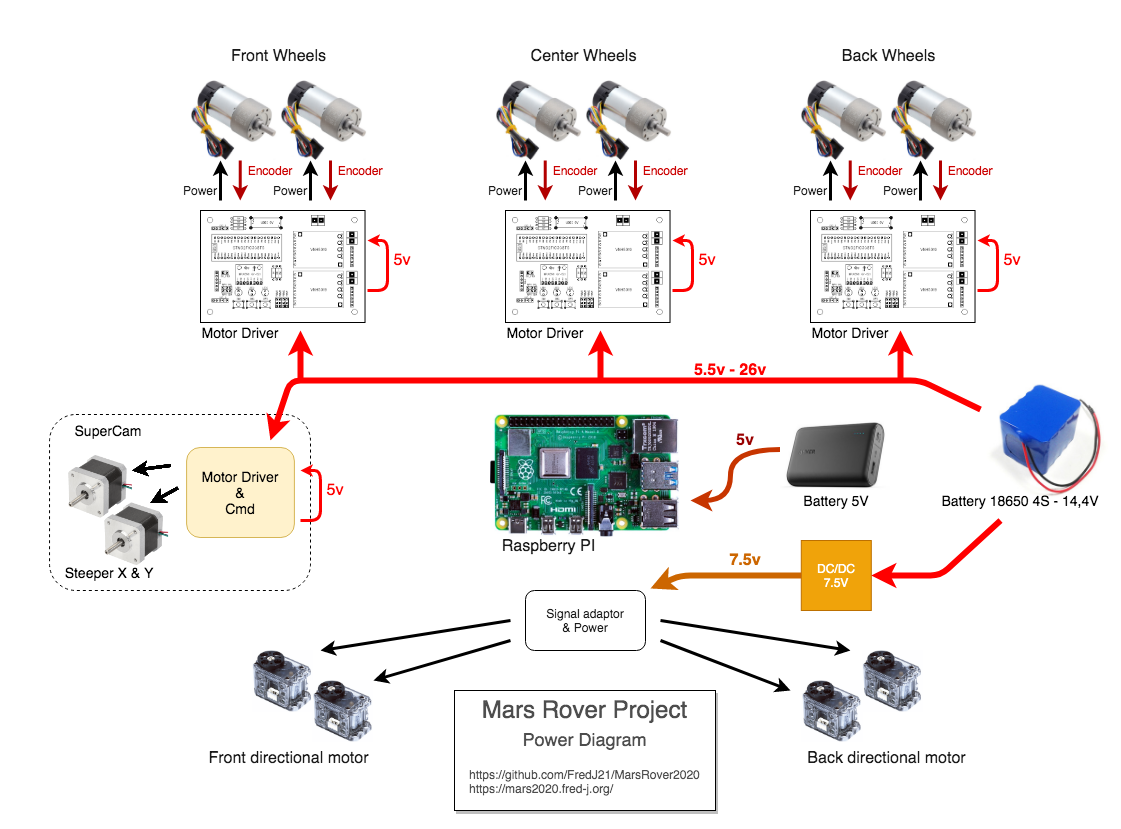
Les modules de gestion moteur embarquent un régulateur de tension 5v de type Ubec. Elle peuvent donc être alimentée avec une tension de 5.5v à 26v.
Les moteurs de direction Dynamixel nécessitent une tension de 7.5v. Un régulateur DC/DC est en charge de fournir le 7.5v.
https://github.com/FredJ21/MarsRover2020/tree/master/Electronic