This repository contains the complete software for the FRC Team 190 2k25 robot. This document outlines the core architectural decisions, subsystem interactions, and operational strategies.


Our codebase is designed with a modular, scalable architecture that reflects best practices in FRC programming. The primary goal is to create clean, maintainable, and easily navigable code, adhering to the standards outlined at team-190.github.io/190-Robot-Code-Standards/.
- Command-Based Framework: We utilize WPILib's command-based framework to structure robot actions. The
commandspackage contains command classes that control one or more subsystems, allowing for complex sequences and parallel execution. - AdvantageKit Integration: The main robot class (
Robot.java) extendsLoggedRobotto integrate AdvantageKit for advanced logging, telemetry, and replay. This is critical for diagnosing issues and optimizing performance. - Robot Container:
RobotContainer.javais the central hub for connecting joystick inputs to commands, configuring autonomous routines, and managing interactions between subsystems. - Constants Class: The
Constants.javafile centralizes operational parameters like motor speeds and sensor thresholds, making it easy to switch between different robot versions and operating modes (e.g.,REAL,SIM,REPLAY).
A key feature of our project is the support for multiple robot versions within a single codebase.
- Shared Codebase: This allows us to develop and test multiple robot designs (
v0_funky,v1_stackUp,v2_redundancy) while keeping all code in one place. Shared components (likedrive) are centralized, while robot-specific subsystems are isolated in their respective packages. - Hardware Abstraction Layer (IO Classes): Each subsystem is paired with an
IOinterface (e.g.,ModuleIO,ElevatorIO) that defines its capabilities. We have multiple implementations for this interface:ModuleIOTalonFX: For CTRE motor controllers.ModuleIOSim: For running simulations without hardware. This abstraction allows for development and testing in simulation before deploying to a physical robot, streamlining our workflow.
- Automatic Deploy Verification: To prevent deploying incorrect code to our competition robot, we use a "two-factor authentication" system. Each robot has a unique identifier string. During deployment, a script cross-references this ID with the desired robot defined in the code. The deployment only proceeds if they match.
- GitHub Workflow: We use a public GitHub repository for collaboration.
mainbranch: Hosts tested, stable code.developmentbranch: Hosts code currently being worked on.feature-*branches: Used for developing new features. Work is merged intodevelopmentvia pull requests after review and testing.- Issues: We use GitHub Issues to track bugs, features, and requests from other sub-teams.
The V2_Redundancy robot utilizes a finite state machine (FSM) to manage the complex interactions between its scoring and intake mechanisms, preventing collisions and ensuring safe, repeatable movements. This was inspired by FRC 6328
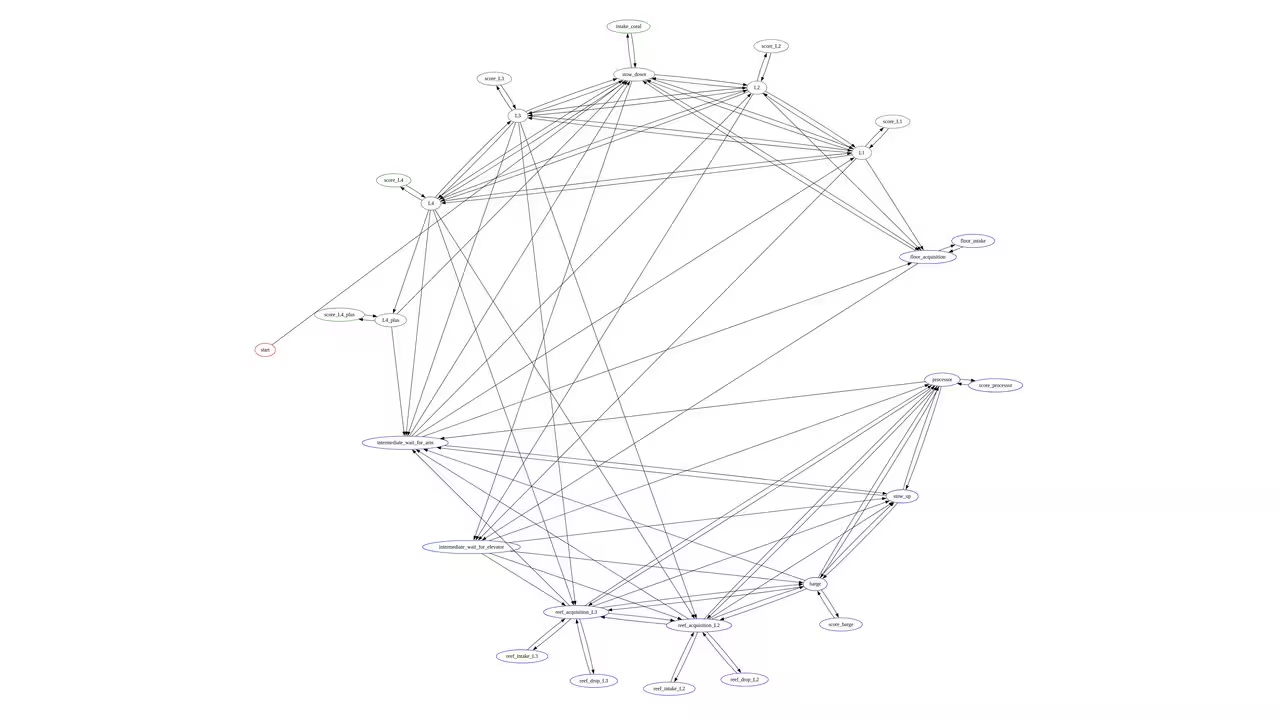
V2_RedundancySuperstructure.java: The central class that orchestrates all other subsystems. It uses aJGraphTgraph to represent all possible states and transitions.V2_RedundancySuperstructureStates.java: An enum defining every possible state of the robot (e.g.,STOW_DOWN,INTAKE_FLOOR,SCORE_L4).V2_RedundancySuperstructurePose.java: Defines the physical setpoints (positions) for each subsystem (Elevator, Arm, Intake, Funnel) that correspond to a given state.V2_RedundancySuperstructureAction.java: Defines the active behaviors (roller speeds) for each subsystem in a given state.V2_RedundancySuperstructureEdges.java: This crucial class builds the state graph. It defines every valid transition (edge) between states and associates aCommandwith each one. The FSM uses a Breadth-First Search (BFS) on this graph to find the shortest path from the current state to the desired goal state, scheduling the necessary commands to execute the transition safely.
- Function: Controls the 4-module swerve drive using Kraken X60 motors for both drive and steering.
- Odometry:
- Internal: Uses motor feedback (position and velocity) to determine field-relative position. Prone to drift from wheel slip and collisions.
- External (Vision Correction): A 3-camera Limelight system detects AprilTags to continuously correct for odometry drift, enhancing autonomous consistency.
- Interaction: Provides pose data to
RobotStateLL. Controlled byDriveCommandsin teleop andChoreotrajectories in auto.
- Function: Provides precise robot localization.
- Hardware: Three Limelight cameras (one center, two angled on edges).
- Logic: Uses
MegaTag2to get pose estimations from each camera. Tags that are closer are trusted more (lower standard deviation). This fused data corrects the internal odometry inRobotStateLL.
- Function: Manages the primary vertical lift for scoring.
- Hardware: Multiple CTRE Kraken X60 motors.
- Interaction: A core component of the
Superstructure, moving to heights defined by the currentV2_RedundancySuperstructurePose.
- Function: Controls the pivoting "Clap Daddy" mechanism to guide and secure game pieces.
- Hardware: CTRE Kraken X60 motor, CANcoder for absolute position.
- Interaction: Coordinated by the
Superstructureto open for intake and close to secure pieces.
- Function: Primary scoring and intake mechanism for "Coral" and "Algae".
- Hardware: CTRE Kraken X60 motors for arm rotation and roller control.
- Interaction: Moves to various angles (
ManipulatorArmState) as directed by theSuperstructure.
- Function: A linear extending intake for floor pickup of game pieces.
- Hardware: CTRE Kraken X60 motors for extension and roller.
- Interaction: Extends and retracts based on the
Superstructurestate, primarily forINTAKE_FLOOR.
- Function: Manages the endgame climb.
- Hardware: CTRE Kraken X60 motor, redundant digital inputs for state detection.
- Interaction: Sequenced by
CompositeCommandsto ensure other mechanisms are stowed before climbing.
- Function: Provides visual feedback to drivers.
- Hardware: Addressable LED strip.
- Interaction: Reads state from
RobotStateLL(e.g.,isAutoAligning,hasAlgae) to display patterns.
- Path Generation: We use Choreo to design smooth, efficient, and constraint-aware autonomous trajectories.
- Path Execution: The
LoggedAutoFactoryloads these trajectories.AutonomousCommands.javasequences them with other actions (like intake/scoring) to create full auto routines. - Auto-Alignment: Before scoring, a vision-based command (
DriveCommands.autoAlignReefCoral) uses Limelight data to precisely align the robot to the reef, compensating for any path inaccuracies.
- Two-Driver System: We use two Xbox controllers for intuitive control.
- Driver: Manages robot movement (translation and rotation) and triggers high-level intake/scoring sequences.
- Operator: Manages the end-effector functions (Elevator height, Funnel, Manipulator, Climber).
- Game Piece Sensing (V2):
- Coral: Detected by monitoring current spikes on the intake motor when it's trying to maintain position against the coral piece. A
RobotStatevariable ensures this logic only runs when an intake command is active. - Algae: Detected by monitoring the manipulator roller's velocity and acceleration. When algae is detected, a dynamic holding voltage is applied to the roller to prevent it from slipping, adjusting based on motor current.
- Coral: Detected by monitoring current spikes on the intake motor when it's trying to maintain position against the coral piece. A