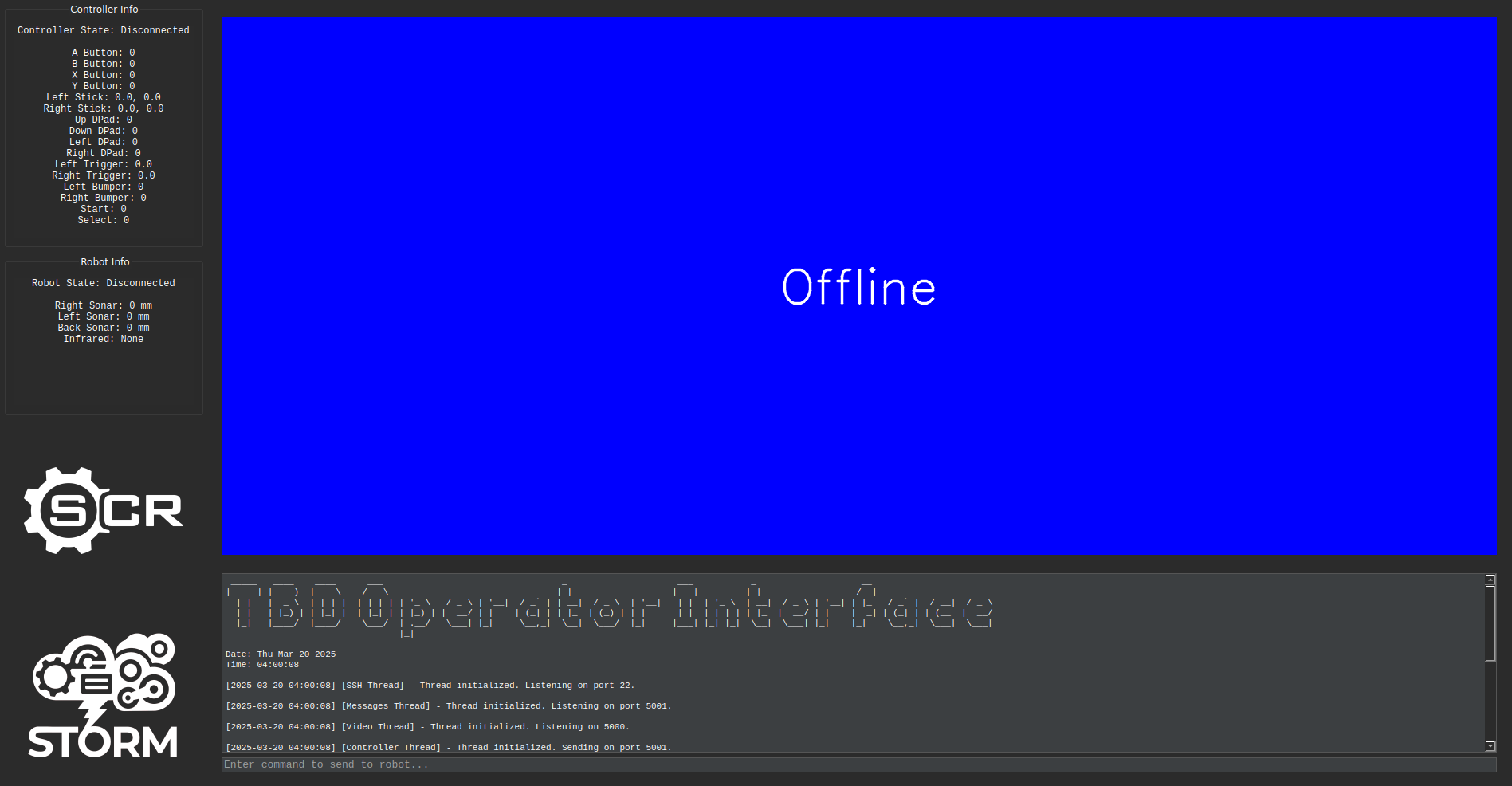
Software for our 2025 Student Teleoperated Robotics Mission entry, TBD.
We are using PyQt6 on Ubuntu 24.04 for the operator, Boost.Asio on Raspbian Bookworm for the robot, and PlatformIO for our firmware.
To set up the dependencies for the operator code, run the following commands.
python3 -m venv venv
source venv/bin/activate
cd operator
pip install -r requirements.txtTo set up the dependencies for the robot code, run the following commands.
sudo apt update
sudo apt install build-essential cmake libboost-all-dev libopencv-dev libqt5core5a libqt5widgets5 libqt5gui5 libgstreamer1.0-0 libavcodec-dev libavformat-dev libswscale-dev libgstreamer-plugins-base1.0-0 libopencv-core-dev libopencv-imgproc-dev libopencv-highgui-dev
python -m venv venv
source venv/bin/activate
cd operator/src
python3 app.pyThe operator code automatically begins the robot's code when it runs via SSH. But, the following commands can run the code on their own.
cd robot
./launch.sh # 1: Build, 2: Run, 3: Build/Run/Clean, 4: Cleancd robot
mkdir build && cd build
cmake ..
make
./robot